-
Jess Tate
Rob MacLeod
SCI Seg3D Mailing List
Text archives Help
- From: Ayla Khan <ayla@sci.utah.edu>
- To: seg3d@sci.utah.edu
- Subject: [Seg3D] Re: Interpreting the result of the Point Set Registration
- Date: Thu, 19 Dec 2013 22:05:03 -0700
| Hi Sergio, I attempted to reproduce your problem with a very simple tooth dataset, and also increasing the iterations. The translation parameters in X is approximately -8. The Y parameter gets reasonably close to 0. Z is a bit larger, but still fairly close to 0. Can you send me your project, or give me more information about the data you were working with? Thanks, Ayla 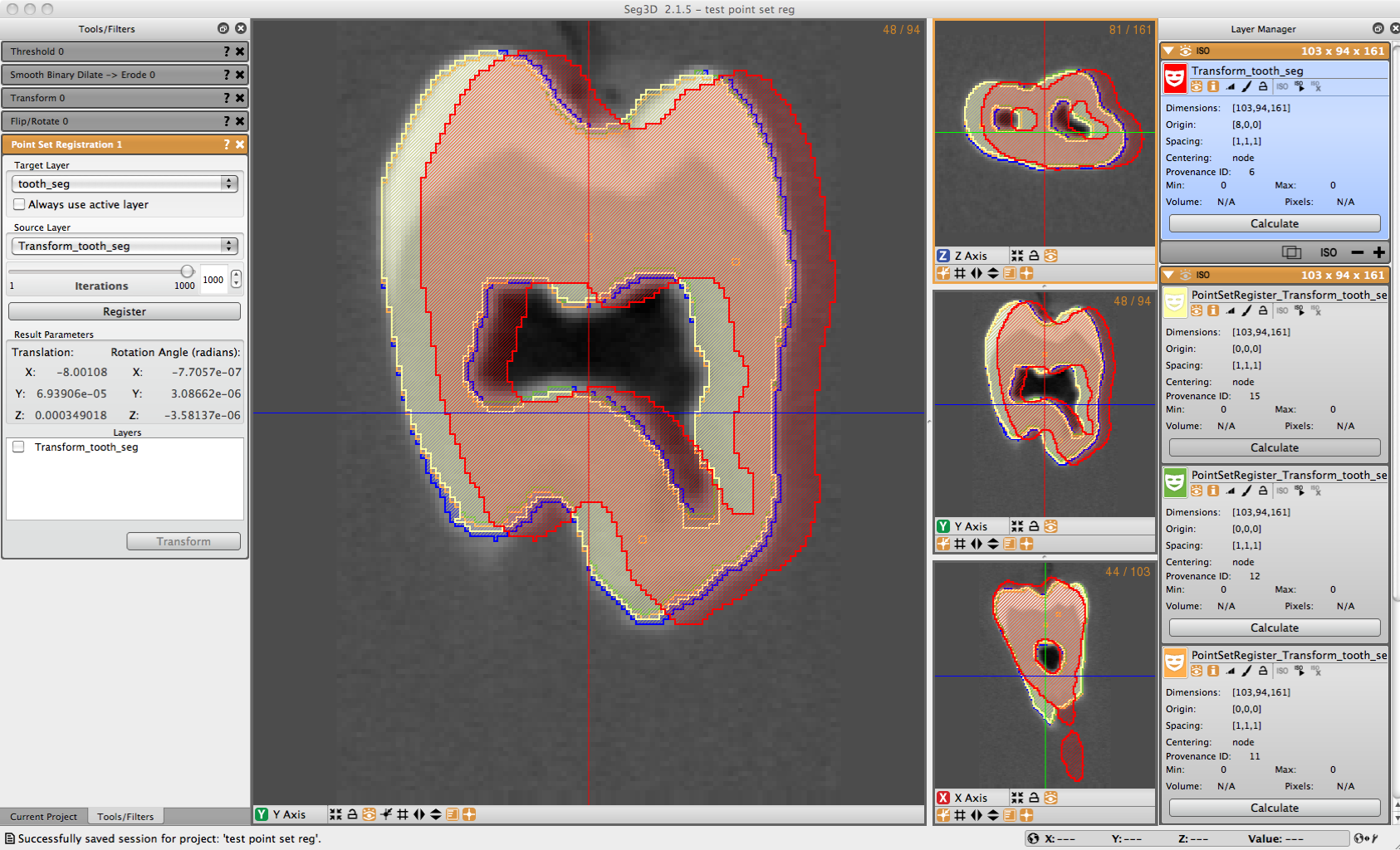 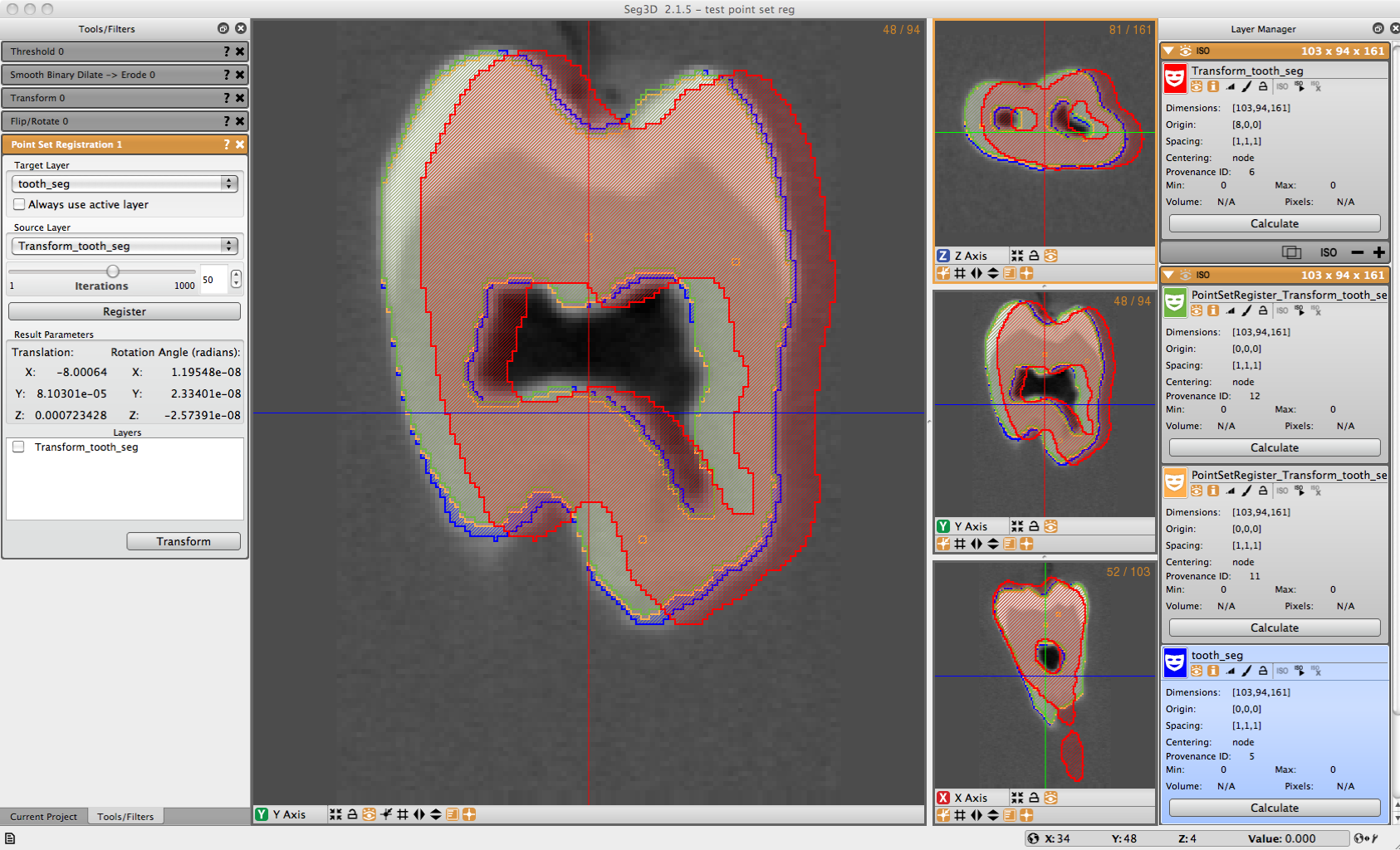 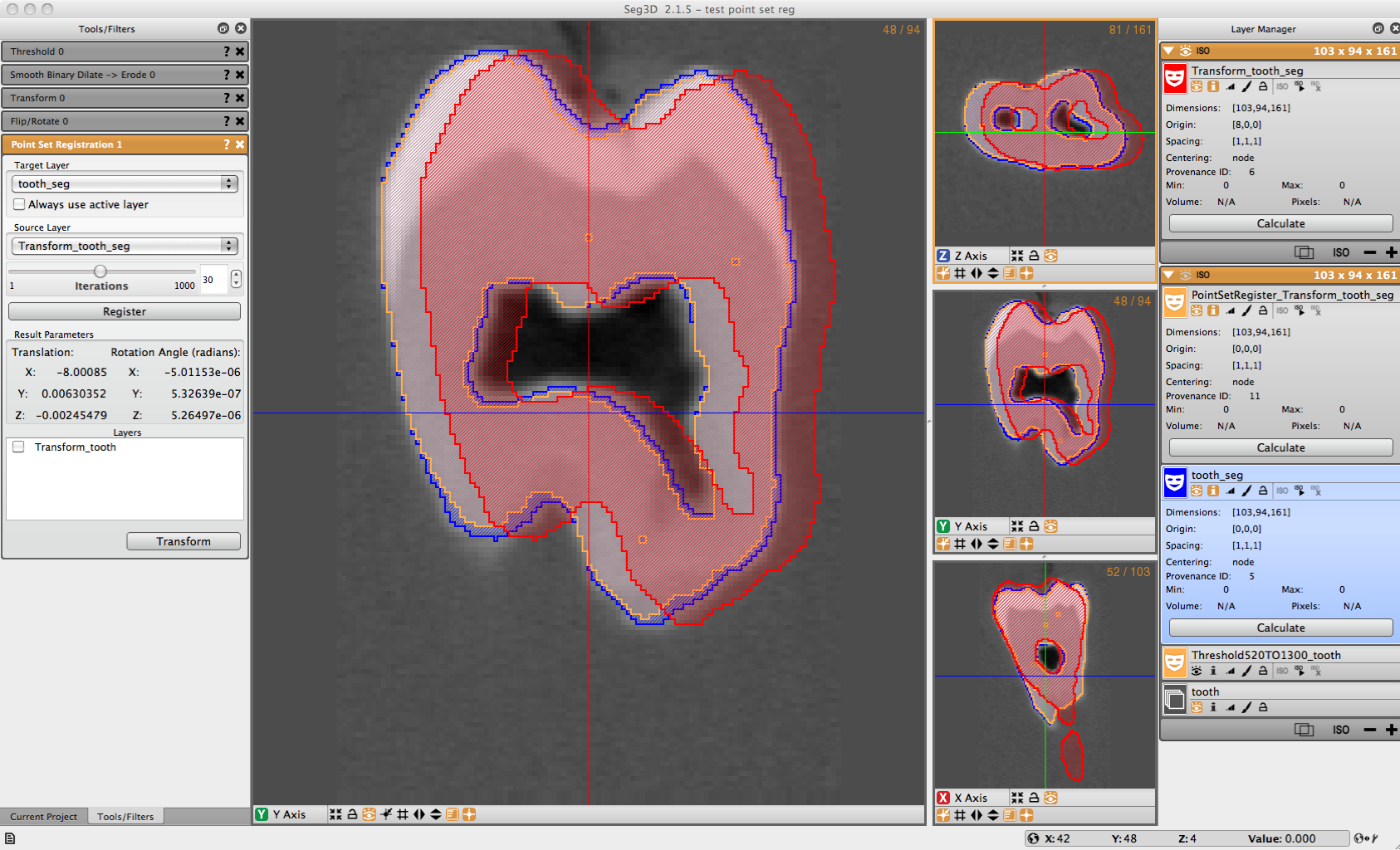 On Dec 19, 2013, at 5:24 AM, Sergio Vera wrote:
|
- [Seg3D] Interpreting the result of the Point Set Registration, Sergio Vera, 12/19/2013
- [Seg3D] Re: Interpreting the result of the Point Set Registration, Ayla Khan, 12/19/2013
Archive powered by MHonArc 2.6.16.